L'ensemble des tutos ci-dessous sont destinés aux élèves du lycée André Malraux de Montereaux Fault-Yonne et sont adaptés à notre matériel.
Tutos Arduino
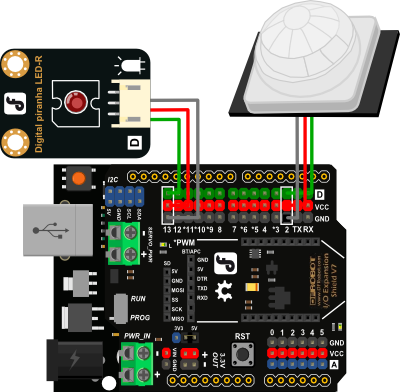
Led
 | |
| |
 | |
 | |
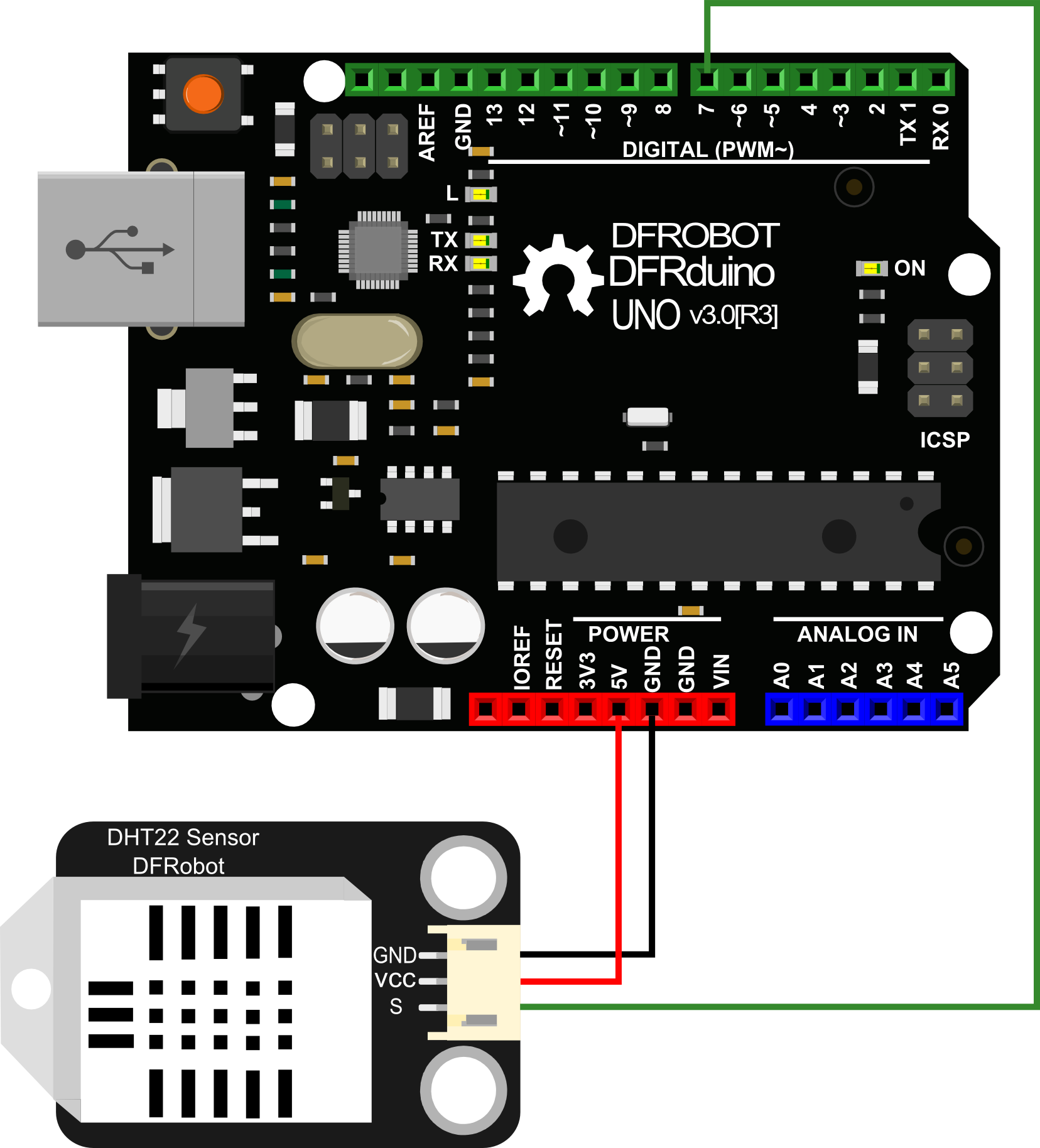
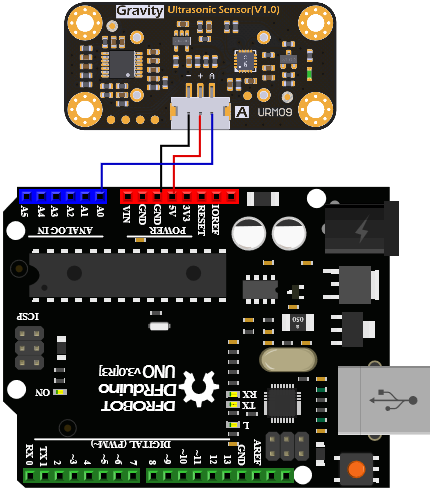
Capteurs et détecteurs
| |
 | |
 | |
 | |
 | |
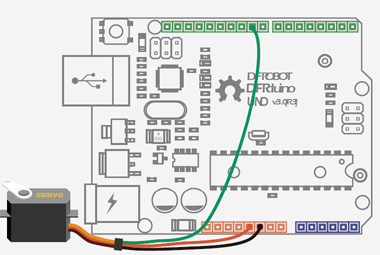
Motorisation
 | |
 | |
L'ensemble des tutos ci-dessous sont destinés aux élèves du lycée André Malraux de Montereaux Fault-Yonne et sont adaptés à notre matériel.
| |
| |
| |
| |
| |
| |
| |
| |
| |
| |
| |